モバイルロボット向けの正確なリアルタイムローカリゼーション
簡単かつ迅速にシステムに統合できる、モバイル搬送ロボットのリアルタイムローカリゼーション用ソフトウェアをお探しですか?ボッシュ レックスロスのローカリゼーションソフトウェア ROKIT Locatorが最適です。柔軟な統合オプション、簡単なコミッショニング、ローカリゼーションソフトウェアの直感的な利用により、ROKIT Locatorは開発とアプリケーションの労力を軽減できるだけでなく、顧客のサービスニーズも削減できます。これにより、市場投入までの時間を短縮できるだけでなく、差別化機能に完全に集中することもできます。ソフトウェア単体でのソリューションに加え、当社弊社はROKIT Locator.Boxを提供します。これは、ソフトウェアが小型の産業用コンピュータにインストールされており、すぐに使うことが可能です。
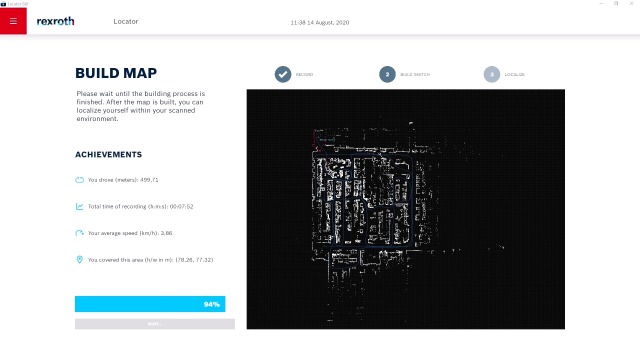
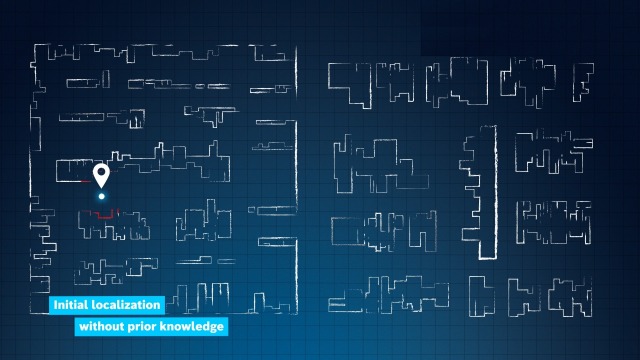
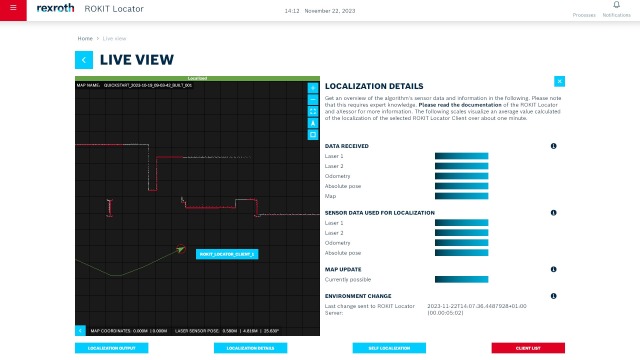
レーザベースのローカリゼーションおよびマッピングソフトウェア
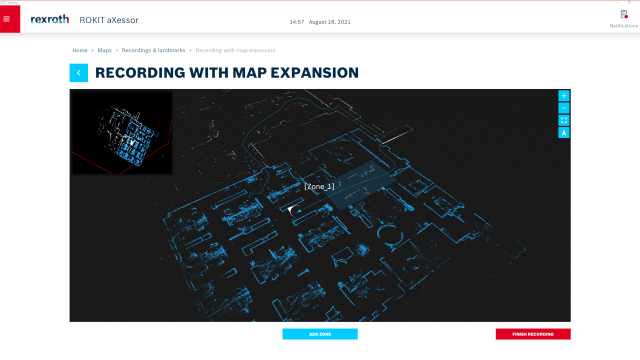
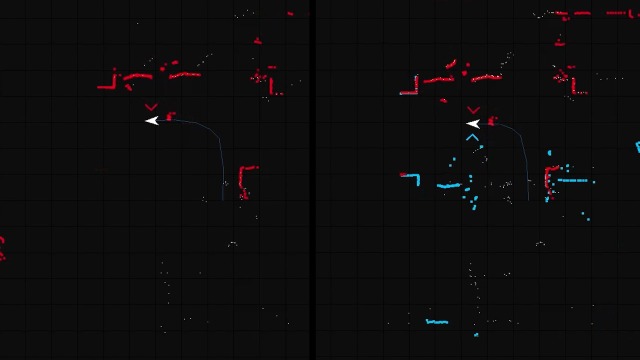
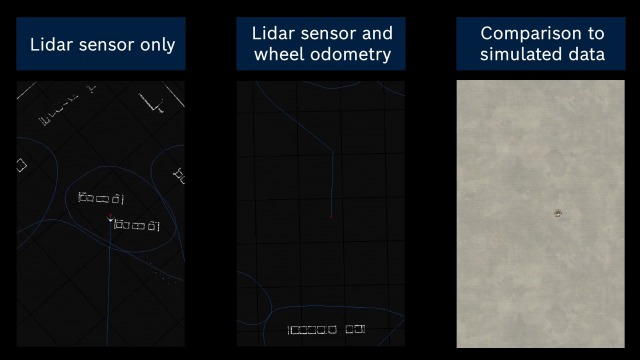
レックスロス ROKIT Locatorは、モバイルロボットの位置決めとダイナミック環境でのマッピング(SLAM)を同時に行うレーザベースのソフトウェアです。パワフルなアルゴリズムによって、車両に取り付けられている最大2台のレーザスキャナからの情報を利用し、自然環境を確実に捉え、マッピングします(自然ナビゲーション)。さらに、リアルタイムロケーションシステム(RTLS)は運転中に環境の変化を検出し、周囲のデジタルマップを自動的に更新し、それらの情報をROKIT Locator全体で利用できます(自動マップアップデート)。ローカリゼーションは信頼性が高く、堅牢で1cm以内の精度 - リフレクタやマーカは不要です。オープンスペースなどの特殊な状況では、ホイールオドメトリ(車輪と走行距離計)などの追加のセンサーをオプションで考慮することができます。





リリースニュース:最新情報
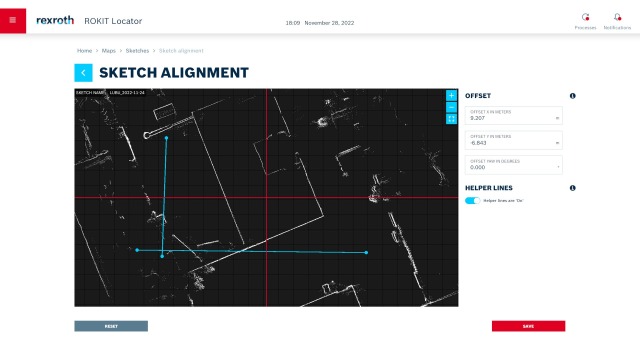
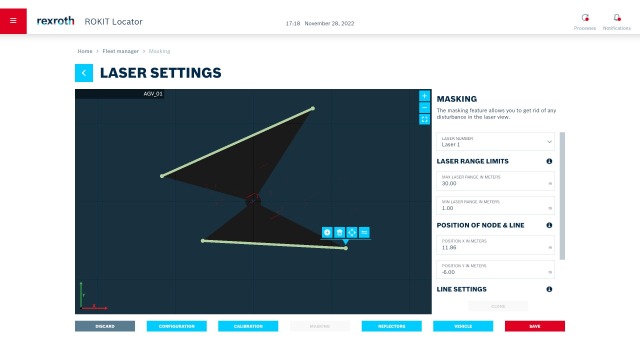
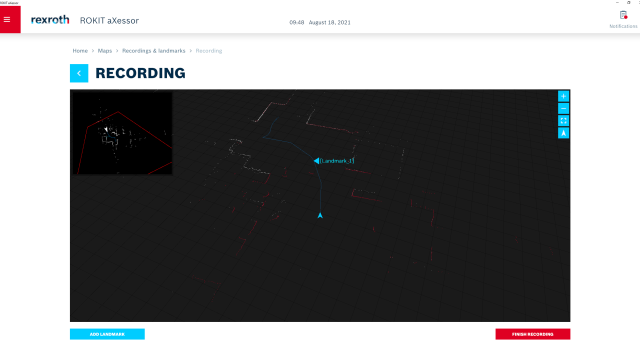
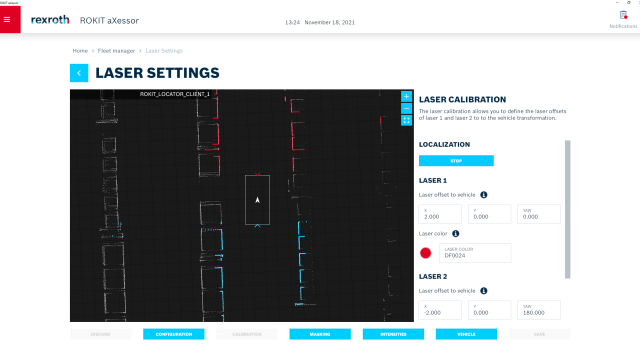
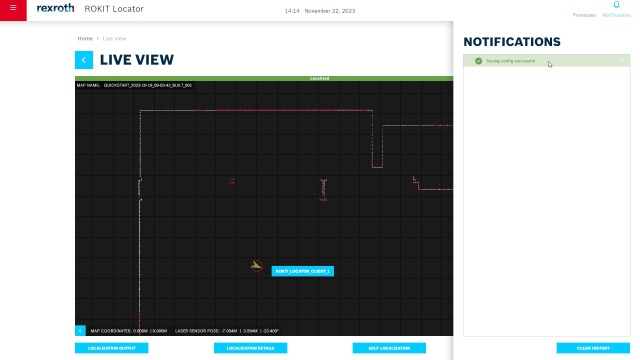
ROKIT Locatorはお客様からのフィードバックにより、開発が続けられています。ここでは、ローカリゼーションソフトウェアとグラフィカルユーザーインターフェースaXessorの進歩と新機能の概要をご覧いただけます。


ROKIT Locator.Box - 既成概念にとらわれないローカリゼーション
ROKIT Locatorは、ソフトウェア単独のソリューションとしてもROKIT Locator.Boxとしても利用可能で、小型の産業用コンピュータに対応します。ROKIT Locator.Boxは、レックスロスのレーザーローカリゼーションソフトウェアをモバイルロボットに便利かつ実用的に組み込むために設計されています。プリインストールされてライセンスが与えられたROKIT Locatorソフトウェア、完全にサポートされているオペレーティングシステム、産業用グレードの非常にコンパクトで堅牢な構成の産業用PC (Pokini F2)で構成されています。


参考資料
ROKIT Locatorの概要を入手する
テストライセンス
弊社はユーザーのアプリケーションに合わせて、レックスロス ROKIT Locatorを現場でテストできる機会を提供し、サポートいたします。お問い合わせフォームをご利用いただき、リクエストしてください。