




Współczesne rozwiązania systemowe dla zastosowań przyszłości
Rozwiązania sterowania wtórnego firmy Rexroth
Oczekiwania względem rozwiązań systemowych są obecnie większe niż kiedykolwiek. Wysoka wydajność, niskie zużycie energii, wysoka dynamika i precyzyjne możliwości sterowania – to tylko niektóre właściwości, którymi musi charakteryzować się nowoczesna strategia sterowania. Napędy sterowane wtórnie firmy Bosch Rexroth łączą w sobie wysoką dynamikę z precyzją sterowania i funkcją odzyskiwania energii.
Odkryj korzyści:
- Wysokie poziomy niezawodności i dostępności
- Wysoka dynamika prędkości i momentu obrotowego
- Wysoka precyzja i prosta obsługa
- Możliwość magazynowania i odzyskiwania energii
- Równoległa praca różnych odbiorników bez żadnych ograniczeń
- Kompaktowe rozwiązania techniczne
- Elastyczność systemów, zwłaszcza w kontekście funkcji zabezpieczeń
Zastosowania
| Budowa maszyn | Przemysł morski i przybrzeżny | Stanowiska testowe | Transport i obróbka materiałów |
|---|---|---|---|
|
|
|
|
Odniesienia
Manipulator kuźniczy
Układ napędowy sterowany wtórnie
- Moc zainstalowana 2 x 90 kW
- Masa pojazdu: 70 ton
- Masa obrabianego przedmiotu: 20 ton
- Odzysk energii podczas hamowania
Producent: Dango & Dienenthal, Niemcy
Obrotowa scena

Układ napędowy sterowany wtórnie
- Zasilanie zintegrowane z pierścieniowym układem hydraulicznym 3 x 45 kW
- 1 jednostka wtórna A4VSO250DS2
Operator: Opera Państwowa w Pradze
Podwodny pojazd gąsienicowy do górnictwa morskiego (Subsea Crawler Deepsea Mining)

Napęd łańcuchowy sterowany wtórnie.
- Głębokość pracy: 200 m
- Masa pojazdu: 280 ton
- Doskonała kontrola trakcji
Operator: De Beers, RPA
Silnikowa zwijarka kablowa (LCE)

Wciągarka z trakcją sterowaną wtórnie.
- 2* podwójne moduły A4VSG 125 DS2
- Wysoka dynamika sterowania prędkością i momentem obrotowym
- Moc zainstalowana 640 kW
Producent: Dynacon, USA
Żuraw samojezdny SGC 140

Kontynuacja projektu ze względu na doskonałą obsługę pierwszego żurawia przez układ sterowania wtórnego (2010).
- Długość wysięgnika do 130 m
- Średnica pierścienia urządzenia obrotowego: 50 m
- Nośność: 2820 ton
- Przeciwwaga 4000 ton
Producent: Sarens, Belgia
Specjalny system transportowy SHS

System SHS służy do instalacji i wyciągania podwodnych modułów do wydobywania gazu na głębokości roboczej do 320 m.
- 40 * A4VSG355DS2
- Bezpieczna obciążalność: 420 ton
- Moc zainstalowana: 3,5 MW
- Wysokość żurawia: 35 m
Producent: AXTech, Norwegia
Stanowisko testowe Rineer

Stanowisko testowania obciążeń dla trzech osi testowych służące do badania silników łopatkowych Rineer serii maks. 125 o pojemności 4096 cm3.
- 1* moduł podwójny A4VSO750DS1
- 1* moduł podwójny A4VSO125DS1
- Moc zainstalowana: 520 KW
Operator stanowiska testowego: DC USA
Dźwig samochodowy

Wciągarki główna i dodatkowa korzystają z tej samej głównej stacji sterowanej ciśnieniowo, co pozwala ograniczyć zainstalowaną moc.
- Dźwig AHC 135 ton
- Wciągarka dodatkowa AHC 13 ton
- Zintegrowane funkcje AOPS i MOPS
- Zintegrowane zabezpieczenia przez zwisem
Producent dźwigu: TTS, Norwegia
Żuraw samojezdny SGC 120

Promień roboczy może wynosić nawet 130 m Przy promieniu 100 metrów możliwe jest podnoszenie ładunków o masie przekraczającej 600 ton.
- Urządzenie podnoszące i obrotowe sterowane wtórnie
- Długość wysięgnika do 220 m (wysokość do 180 m)
- Średnica pierścienia urządzenia obrotowego: 40 m
- Nośność: 3200 ton
- Prędkość podnoszenia: 20 m/min
Producent: Sarens, Belgia
Beznapędowy system transportowy kontenerów AGV

Napęd sterowany wtórnie, zautomatyzowany transport, określanie pozycji za pomocą czujników zamontowanych w jezdni. Wysoka precyzja pozycjonowania.
- Nośność: 50 ton
- Moc: 275 KW
- Prędkość: 25 km/h
Producent: Kamag, Niemcy
Stanowisko do testowania obciążeń skręcających, RWTH Aachen
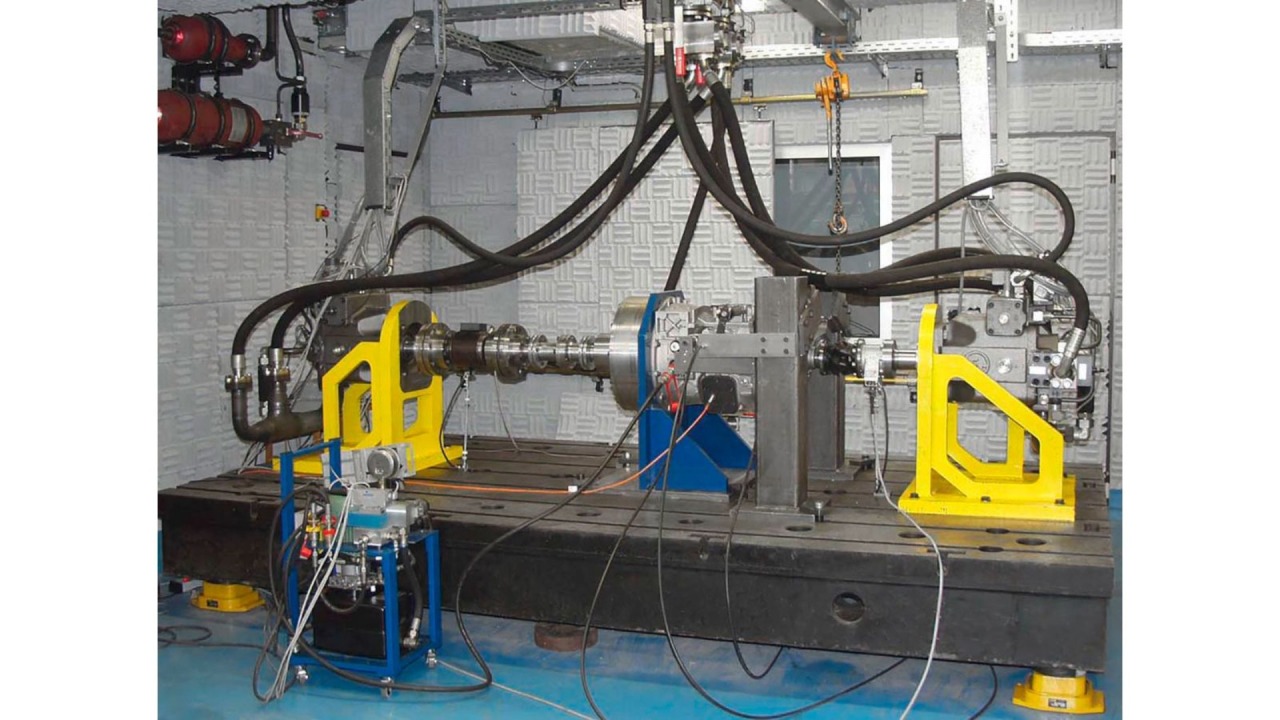
Stanowisko testowe sprzęgła dynamicznego; uwzględnianie kąta skręcania dla obu części sprzęgła, odzysk energii przez moduł obciążający.
- Sterowanie posuwem postępowym
- Pomiar kąta skręcania
- Odzysk energii
Operator: Lehrstuhl und Institut für Maschinenelemente und Systementwicklung Aachen, Niemcy
Stanowisko do testów zderzeniowych

Dzięki zastosowaniu akumulatorów hydraulicznych moc wymaganą do przyspieszania wynoszącą 530 kW można obniżyć do 30 kW mocy podstawowej.
- Odzysk energii
- Redukcja mocy
- Różnica prędkości obrotowej < 0,3 km/h
Operator: Autoliv, Szwecja
Beznapędowy system transportu kontenerów CT60

Ponad 200 pojazdów używanych w terminalach kontenerowych w Rotterdamie i Hamburgu. Określanie pozycji za pomocą czujników zamontowanych w jezdni.
- Nośność: 60 ton
- Precyzja pozycjonowania < 1 cm.
- Wysoka precyzja prędkości niezależnie od obciążenia.
Producent: Gottwald, Niemcy
Stanowisko symulowania siły odśrodkowej

Do uzyskania mocy przyspieszającej na poziomie 3000 kW wymagana jest jedynie moc podstawowa 800 kW. Odzyskiwane jest nawet 60% energii.
- Moment bezwładności: 35 000 kgm2
- 24 * moduły A4VSO250DS1
- 30-krotność przyspieszenia grawitacyjnego
Operator: Framatome, Francja
Statek do układania kabli telekomunikacyjnych

Statek ciągnie pług, który otwiera dno morskie, a następnie układa kabel i zakopuje wykop. Wysoka dynamika systemu sterowanego wtórnie zapobiega zerwaniu liny pługu w przypadku jej zablokowania.
- Głębokość do 1500 m.
- 4 * 355 A4VSO
- Nośność: 130 ton
Producent: Odim, Norwegia
Napęd napinacza w systemie układania rurociągu

Dwa połączone szeregowo napinacze opuszczają fragmenty sztywnych lub elastycznych rurociągów o średnicy do 16 cali na głębokość do 2500 metrów.
- Nośność: 2 * 275 ton
- Głębokość układania do 2500 m
- Układanie rur o średnicy do 16 cali
Producent: Huisman, Holandia
Aktywna stabilizacja kołysania

Sterowane wtórnie napędy współpracują tradycyjnymi napędami hydrostatycznymi w ramach jednego systemu. Napęd tradycyjny podpowiada za podnoszenie, natomiast napędy sterowane wtórnie realizują aktywną kompensację kołysania.
- Wartość kompensacji > 90%
- Nośność: 160 ton
- Głębokość robocza do 2100 m
Producent: Kenz, Holandia
Wciągarka głębinowa

Konwencjonalne systemy wciągające wyposażone w ciężkie liny stalowe osiągają graniczne głębokości na poziomie 2500 m. Liny syntetyczne są lżejsze, ale ich obsługa jest trudniejsza ze względu na większą rozciągliwość. Dzięki sześciu napędom sterowanym wtórnie po raz pierwszy udało się skutecznie rozwiązać ten problem.
- Lina syntetyczna
- Nośność 50 ton
- Głębokość robocza > 2500 m
Producent: Odim, Norwegia
Napęd dźwigowy dla platformy zbiornikowej

Obydwa zamontowane dźwigi służą do transportu zasobów na statki ładunkowe lub ze statków na platformę. Bez funkcji aktywnej kompensacji kołysania taki załadunek i rozładunek nie byłby możliwy. Osprzęt podnoszący jest sterowany wyłącznie wtórnie. Mechanizm obrotowy również jest sterowany wtórnie, ale dodatkowo obsługuje go tradycyjny hydrauliczny napęd obrotowy.
- Aktywna kompensacja kołysania z zabezpieczeniem przeciążeniowym
- Nośność: 5 ton
- Prędkość podnoszenia 100 m/min
Producent: Sevan Marine, Norwegia
Napęd wciągarki robota podwodnego

Sterowany wtórnie napęd wciągarki opuszcza moduł transportowy wraz z robotem podwodnym (ROV). W trybie aktywnej kompensacji kołysania robot ROV zostaje odblokowany i można nim zdalnie sterować w celu wykonywania operacji konserwacyjnych oraz monitorowania.
- Aktywna kompensacja kołysania z odzyskiem energii
- Nośność: 20 ton
- Prędkość podnoszenia 140 m/min
Producent: Odim, Norwegia
Stery strumieniowe dla holowników

Integracja z istniejącą instalacją hydrauliczną na statku jest tańszą alternatywą dla tradycyjnych systemów sterów strumieniowych. Ograniczenie mocy w napędzie sterowanym wtórnie pozwala na maksymalne wykorzystanie stacji podstawowej.
- Ster strumieniowy o mocy 300 kW
- Projekt modernizacyjny wraz z integracją do istniejącego systemu hydraulicznego
- Niezależne działanie równolegle z pozostałymi układami napędowymi na pokładzie
Producent: Rosetti Marino, Włochy
Uniwersalne stanowisko testowe do hydrauliki

Stanowisko testowe może generować moc 160 kW z obu napędów i po obu stronach. Wiele opcji konfiguracyjnych pozwala wykonywać całą gamę testów – od badań podzespołów po pomiary skuteczności całych systemów.
- Moc zainstalowana 160 kW
- Do 60% odzyskiwanej energii
- Elastyczna konfiguracja pozwalająca na wykonywanie wielu rodzajów badań
Operator: Internationale Hydraulik Akademie, Niemcy
Frezarka do szyn kolejowych

Frezarka szynowa będzie używana do konserwacji i profilowania szyn kolejowych. W tym celu cała frezarka musi być sterowana w sposób zapewniający synchronizację prędkości.
- Sterowany wtórnie napęd dla dwóch wagonów frezujących
- Synchronizacja 4 ram nośnych z 8 modułami sterowanymi wtórnie
- Sterowanie pociągiem o długości do 66 metrów i masie do 300 ton
- Przy prędkości 0,3–2 km/h głębokość frezowania wynosi od 0,3 do 10 mm
Producent: MFL Liezen Austria