




今日的系統解決方案,為明日的應用情境而生
Rexroth 次要控制解決方案
現在,人們對於系統解決方案的期望比以往來的更高。現代的驅動策略應具備各種優勢,高效能、低能源消耗、高靈活度與優異的可控性只是最基本的特質。Bosch Rexroth 的次要控制驅動結合高靈活度與精準控制、能源回收的特點。
探索優勢:
- 可靠性與可用性高
- 高動力的速度和扭矩
- 高精準度且操作容易
- 蓄能與能量回收的潛力
- 可供不同用戶並聯操作,沒有限制
- 安裝空間需求小
- 靈活的系統,尤其注重安全功能
應用
| 機器建構 | 海洋與離岸工程 | 測試平台 | 材料處理與運輸 |
|---|---|---|---|
|
|
|
|
參考資料
鍛造翻鋼機
次級控制驅動系統
- 安裝功率 2 x 90 kW
- 車輛重量 70 t
- 鍛造重量 20 t
- 制動模式之下的能量回收
製造商:德國 Diango & Diementhal
旋轉舞台

次級控制驅動系統
- 電源供應整合至液壓環管系統 3 x 45 kW
- 1 x 次級單元 A4VSO250DS2
操作者:布拉格國家歌劇院
海底履帶式深海採礦

次要控制鏈條驅動。
- 操作深度 200 m
- 車輛重量 280 t
- 優異的軌跡控制功能
操作者:De Beers,南非
線性海纜引擎 LCE

次要控制牽引絞盤。
- 2* A4VSG 125 DS2 串連元件
- 高動力速度和扭矩控制
- 安裝功率 640 kW
製造商:Dynacon,美國
行動式起重機 SGC 140

首部次要控制功能行動式起重機優異的處理流程之後續追蹤專案 2010。
- 懸臂長度最長 130 m
- 迴轉裝置圓環直徑 = 50 m
- 有效載荷 2,820 t
- 配重 4,000 t
製造商:Sarens,比利時
特殊操作系統 SHS

SHS 是用於海底氣體生產模組的安裝與回收,操作深度最深 320 m。
- 40 * A4VSG355DS2
- 安全工作負載量 420 t
- 安裝功率 3,5 MW
- 起重機高度 35 公尺
製造商:AXTech,挪威
Rineer 測試平台

為測試平台裝載三個測試軸,以測試最多至 125 系列,排放量 4,096 cm3 的 Rineer 輪葉馬達。
- 1* A4VSO750DS1 串連元件
- 1* A4VSO125DS1 串連元件
- 安裝功率:520 KW
測試平台操作者:DC USA
折臂式起重機

主要絞盤和輔助絞盤使用相同的壓力控制主工作站並減少安裝功率。
- 135t AHC 起重機
- 13 t AHC 輔助絞盤
- 已整合 AOPS 與 MOPS 功能
- 已整合抗鬆保護裝置
起重機製造商:TTS,挪威
行動式起重機 SGC 120

操作半徑範圍可達 130 m。操作半徑 100 m 時可舉起的負載量 > 600 t。
- 次要控制升高與迴轉裝置
- 懸臂長度最長 220 m(高度最高 180 m)
- 迴轉裝置圓環直徑 = 40 m
- 有效載荷 3,200 t
- 升高速度 20 m/min
製造商:Sarens,比利時
無駕駛貨櫃運輸系統 AGV

次要控制驅動、自動化運輸操作、透過感測器在路基測定位置。高定位精準度。
- 負載量能:50t
- 功率:275 kW
- 速度:25 km/h
製造商:Kamag,德國
扭轉負載測試平台 RWTH Aachen
動態聯接測試平台,考量兩個聯接對分部份的扭轉角度,透過負載單元回收能源。
- 前饋控制
- 扭轉角度測量
- 能源回收
操作者:機械元件研究所 (IME) Aachen,德國
高動態真實撞擊測試平台

使用液壓累加器,所需的 530 kW 加速功率可降至 30 kW 的主要功率。
- 能源回收
- 功率減少
- 旋轉速度差異 < 0.3 km/h
操作者:Autoliv,瑞典
無駕駛貨櫃運輸器 CT60

鹿特丹與漢堡的貨櫃中心有超過 200 台車輛可使用。透過感測器在路基測定位置。
- 負載量能:60t
- 定位精準度 < 1 cm
- 無論負載量皆具備高速精準度
製造商:Gottwald,德國
離心力:模擬測試平台

3000 kW 的加速功率只需使用 800 kW 的主要功率。可回收多達 60% 的能源。
- 慣性矩 35000 kgm2
- 24 * A4VSO250DS1 單元
- 可達重力導致 30 倍加速
操作者:Framatome,法國
電信電纜架設船

船隻拖行海犁挖開海床,埋入電纜後再將之覆蓋。次要控制系統的高動態性可避免受困時海犁繩索斷裂。
- 最深達水下 1,500 m
- 4 * 355 A4VSO
- 130 t 負載量能
製造商:Odim,挪威
管線架設系統的拉力裝置驅動

使用串聯連接式拉力裝置,將最大 16” 的固定式或活動式管線下降至 2,500 m 深處。
- 負載量能:2 * 275 t
- 架設深度最深 2,500 m
- 架設管線最大 16”
製造商:Huisman,荷蘭
主動式起伏補償功能

次要控制驅動與傳統靜液壓驅動在單一系統中一同運作。傳統靜液壓驅動負責升高的功能,上方的次要控制驅動則執行主動式起伏補償功能。
- 補償值 > 90%
- 負載量能 160t
- 運作深度最深 2,100 m
製造商:Kenz,荷蘭
深海絞盤

傳統絞盤系統具備重鋼索,最深可達深度超過 2,500 m 處。合成纖維繩索因其拉伸特性較難以掌控,但重量更輕。在六部次要控制驅動的協助下,這個問題首度得以成功解決。
- 合成纖維繩索
- 負載量能 50 t
- 運作深度 > 2,500 m
製造商:Odim,挪威
油箱平台起重機驅動

兩部安裝好的起重機皆用於轉移救援物資到貨櫃船上或移走物資。少了主動式起伏補償功能,將無法完成裝載和卸載作業。吊運機構完全由次要控制器操控。迴轉機構也是由次要控制器操控,但另有傳統液壓旋轉驅動支援運作。
- 有超載保護措施的主動式起伏補償功能
- 負載量能 5 t
- 升高速度 100 m/min
製造商:Sevan Marine,挪威
水下機器人絞盤驅動

次要控制絞盤驅動運用水下機器人 (ROV) 將供應裝置下降。主動式起伏補償模式中,ROV 會解除塢接,可遠端控制以進行維護或監控運作流程。
- 可回收能源的主動式起伏補償功能
- 負載量能 20 t
- 升高速度 140 m/min
製造商:Odim,挪威
拖船專用艏側推器

整合船上現有的液壓供應系統符合成本效益,可作為傳統艏側推器系統的替代方案。次要控制驅動的動力有限制,因此可最大化主要工作站的使用效益。
- 300 kW 艏側推器
- 整合現有液壓系統的改裝專案
- 與現有其他驅動系統獨立並聯運作
製造商:Rosetti Marino,義大利
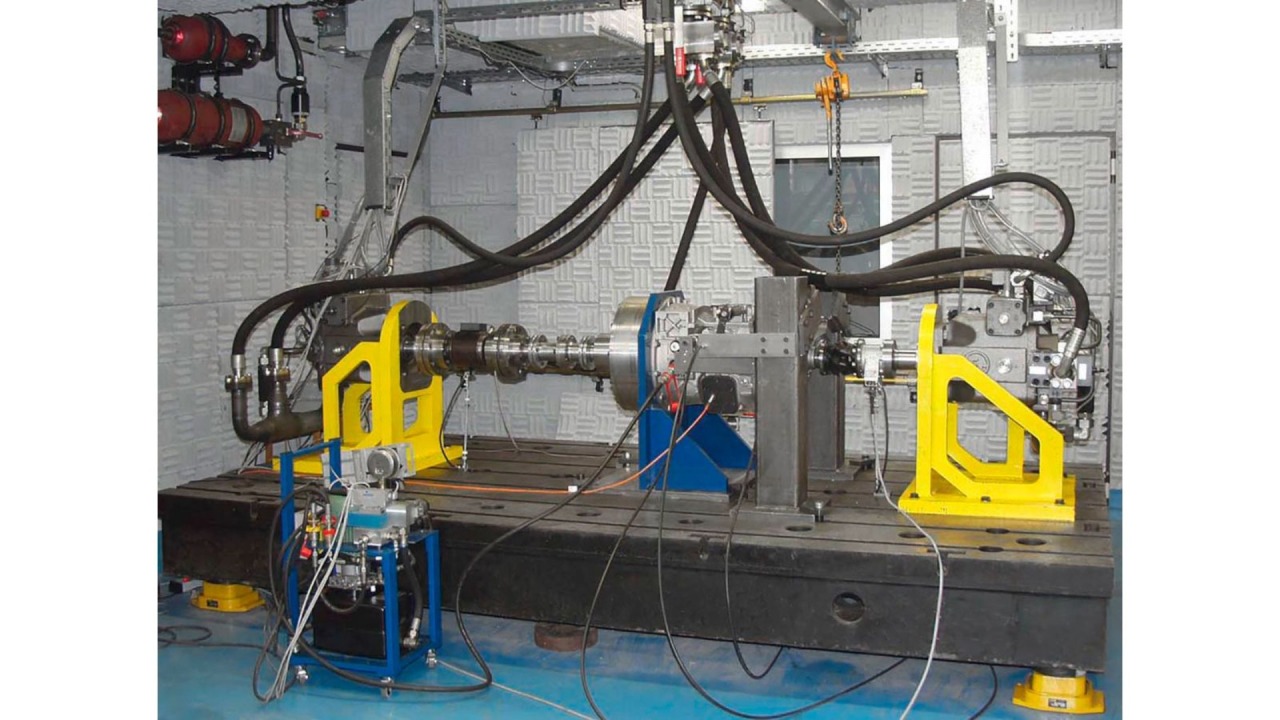
通用液壓測試平台

測試平台可從驅動與負載端以 160 kW 操作。配置選項多樣,可執行豐富的測試,從元件測試到已完成系統的效率測量測試皆可進行。
- 安裝功率 160 kW
- 能源回收率高達 60%
- 配置靈活,可進行多種不同測試
操作者:Internationale Hydraulik Akademie,德國
軌道銑床

軌道銑床將用於軌道的維護重修工程。因此,軌道銑床必須以同步速度前進。
- 兩部銑床車的次要控制驅動
- 擁有 8 個次要控制單元的 4 個底盤同步作業
- 牽引控制超過 66 m 長的火車,總重量 300 t
- 速度為 0.3 – 2 km/h 時,軌道深度達 0.3 mm 到 10 mm
製造商:MFL Liezen Austria