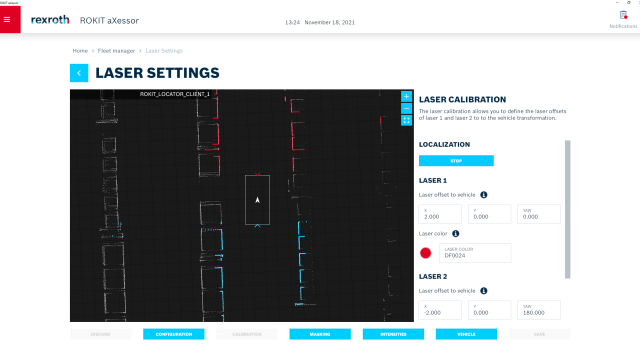
지게차와 같은 수동 구동 차량의 위치를 측정하기 위한 편리한 솔루션을 찾고 계신가요? 그렇다면 더 이상 고민할 필요 없이 Bosch Rexroth의 위치 측정 소프트웨어 ROKIT Locator를 사용해 보세요. 수동 차량과 자율 차량을 모두 사용하는 혼합 작업 환경에서 레이저 위치 측정은 투명성 향상과 최적화된 자재 취급 및 창고 프로세스를 위한 토대를 형성합니다. ROKIT Locator는 기존 시스템의 유연한 통합 옵션과 하드웨어, WMS, ERP 및 지게차 제어 시스템으로부터의 독립성을 제공하고 손쉬운 시운전과 직관적인 사용이 가능하여 개발과 적용 과정에 드는 노력을 효과적으로 줄이고 최종 고객의 서비스 요구 사항을 해소하는 데 도움이 됩니다. 검증된 보쉬 렉스로스 기술을 기반으로 다양한 산업 및 응용 분야의 고객이 전 세계적으로 수천 번 사용한 로컬라이제이션 소프트웨어의 이점을 누릴 수 있습니다.
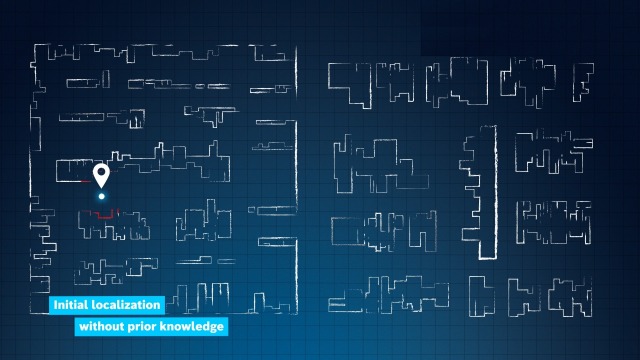
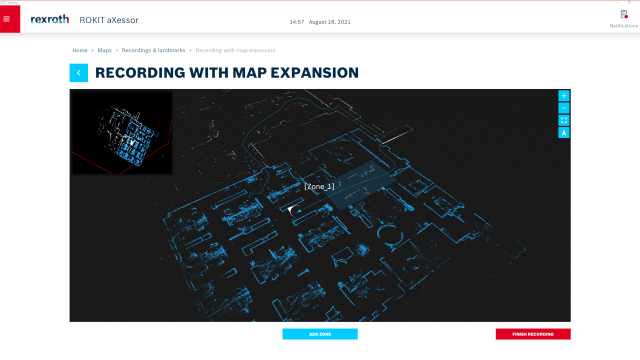
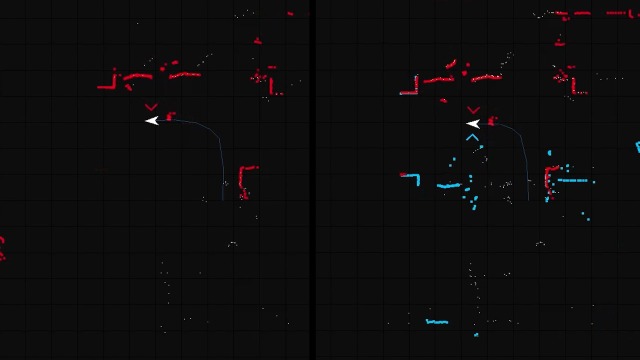
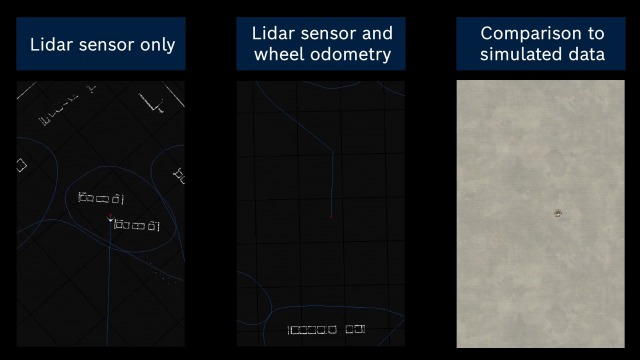
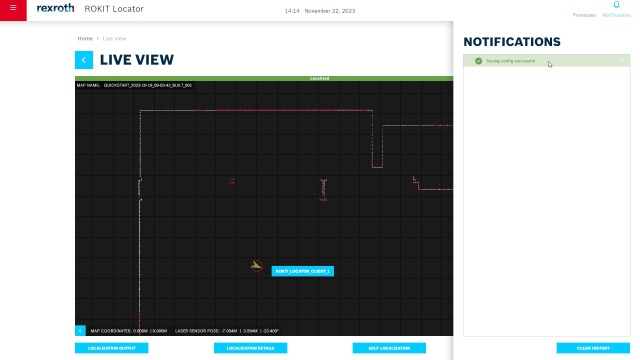
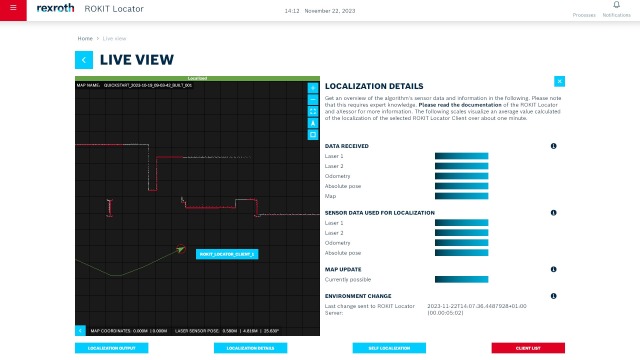
Rexroth ROKIT Locator는 지게차 장비의 위치 지정과 동시에 동적 환경을 매핑(SLAM)할 수 있는 레이저 기반 소프트웨어입니다. 강력한 알고리즘이 차량에 설치된 최대 두 대의 레이저 스캐너에서 제공하는 정보를 사용하여 자연환경을 안정적으로 캡처하고 매핑합니다(자연 항법). 또한 실시간 위치 시스템(RTLS)은 주행 중 발생하는 환경 변화를 감지하고 주변의 디지털 맵을 자동으로 업데이트하여 전체 ROKIT Locator 장비에서 사용할 수 있도록 합니다(자동 맵 업데이트). 위치 측정은 반사면이나 표시물을 사용하지 않고도 신뢰할 수 있고 강력하며 1cm 이내의 정확성을 제공합니다. 개방형 공간과 같은 특수 상황에서는 휠 회전(휠 주행거리계 통합) 등 추가 센서 데이터를 선택적으로 고려할 수 있습니다.
포크리프트와 상품의 실내외 실시간 위치 시스템(RTLS)은 포크리프트 및/또는 AGV 플릿 관리 시스템(혼합 플릿)의 위치 추적을 위한 가장 중요한 전제 조건입니다. 이를 통해 포크리프트의 절대적 추적 가능성이 활성화되며, 팔레트, 와이어 팔레트 케이지 또는 페이퍼 롤(track & trace)과 같은 이동 상품은 물론 자동화 오더 피킹 및 자동 인벤토리가 보관 및 회수 중 오류를 방지하며 검색 노력을 줄여줍니다. 이외에도, 포크리프트의 실시간 추적은 자동화 스캔 공정을 통해 비용 절감 및 생산성 증대의 가능성이 무부하 완속 운전이 줄어듭니다.



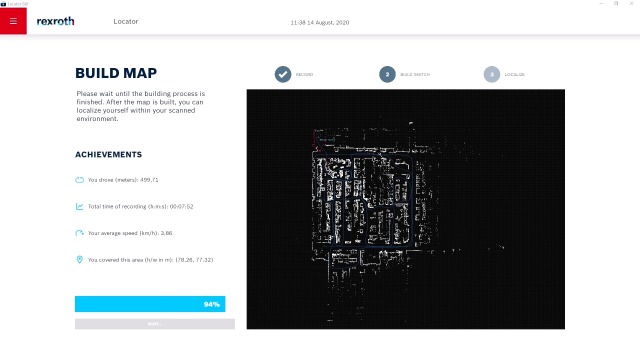
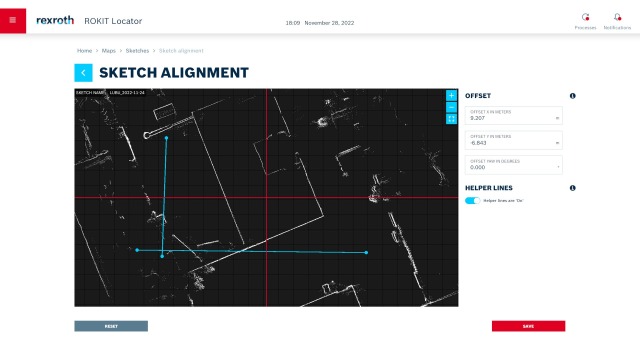
실시간 위치 추적 및 매핑 소프트웨어는 설정하기가 쉽고 빠르며 신뢰할 수 있는 방식으로 작동하므로 수동 지게차의 위치 판단에 대해 걱정할 필요가 없습니다. 예를 들면 변속기 변경 때문에 차량을 재시동한 후에도 ROKIT Locator는 곧바로 자동으로 현재 위치를 찾아냅니다. 또한 블록 창고 및 고층 입체 창고와 같은 변화하는 환경에 유연하게 적응하여 전체 지게차 플릿의 맵을 자동으로 업데이트합니다.
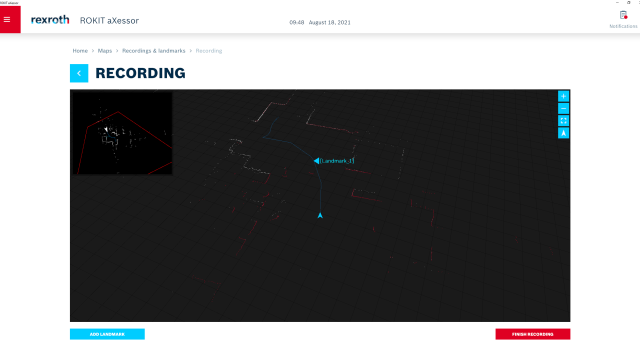
ROKIT Locator는 제공해 주신 피드백을 바탕으로 지속적으로 개발 중입니다. 이곳에서 위치 측정 소프트웨어와 그래픽 사용자 인터페이스 aXessor의 개발 진행 상황과 새로운 기능에 대한 개요를 확인할 수 있습니다.
순수 소프트웨어 솔루션 ROKIT Locator 또는 ROKIT Locator.Box 중에서 선택할 수 있으며 초소형 산업용 컴퓨터에서 바로 사용 가능합니다. ROKIT Locator.Box는 레이저 위치 측정 소프트웨어를 모바일 로봇에 편리하고 실용적으로 통합하기 위해 설계한 것으로, 사전 설치 및 라이선스 취득을 완료한 ROKIT Locator 소프트웨어, 완전한 운영 체제, 산업용으로 적합한 매우 작고 견고한 고성능 산업 PC(Pokini F2)로 구성됩니다.