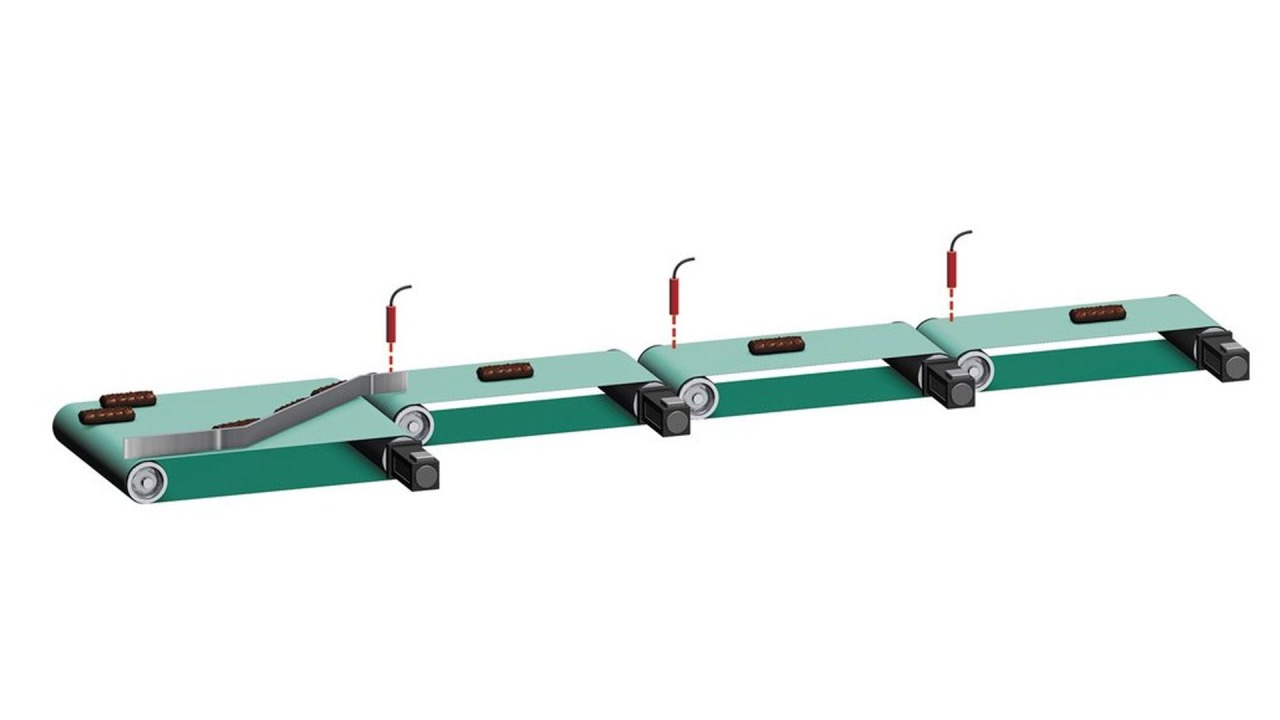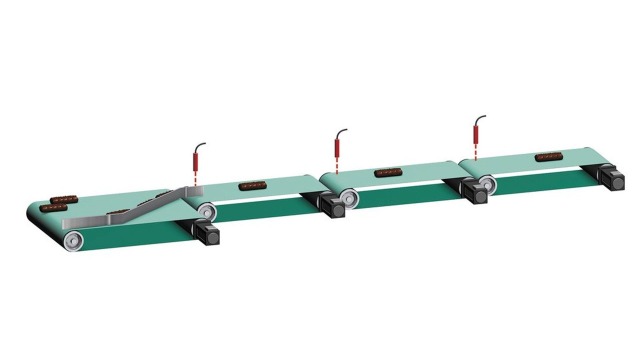
インテリジェントなインフィードシステム
製品はマルチパスで分類して箱詰めされます。この手順は、トップローディング・サイドローディングマシンの両方に応用されています。別々に駆動される2つの平行チェーンまたはベルトはそれぞれ、接続ポケット付き車両を運びます。一杯になった車両はアンローディングステーションで荷を降ろされ、すぐにローディングステーションに戻ります。

製袋充填
平行・垂直・熱成形の製袋充填ソリューションにより、IndraDrive Miでのケーブリングやスイッチキャビネット費用が削減されました。これにより、Rexroth FlexProfileで最速の成形や製品変更が可能になり、また最適化されたエンジニアリングへの拡張的なテクノロジー機能が含まれています。
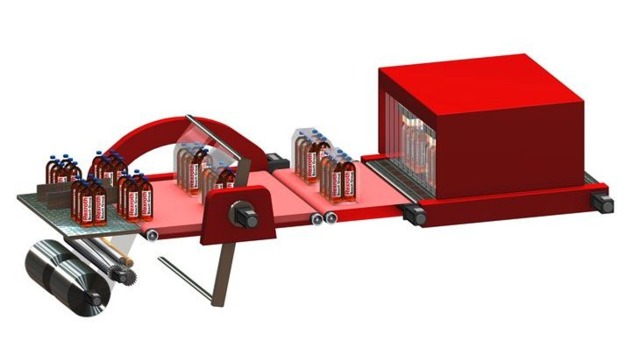
ユニットパッケージの包装
注入後、コンテナは正しい距離へと運搬されます。コンテナグループ上に置かれる前に、ナイフが延伸されたフィルムを正確な長さに切ります。サーボ制御のメカニズムにより、コンテナバンドルがいたるところでフィルムに包装されるようになっています。コンテナバンドルは隣のシュリンクトンネルで加熱処理されます。このプロセスにより、非常に安定した包装成形が可能になります。

箱詰め
カートンは圧縮空気装置によってカートリッジから取り出され、シークエンサでコンベアポケットに同期的に入れられます。CAMディスク機能により、事前に切断されたパーツが同期的に引き継がれます。事前切断パーツはタイミングチェーンに留められ、成形ステーションに運ばれた後、電気制御式ノズルで糊付けされます。

パレタイズおよびデパレタイズ
表示されているパレタイザが3軸(X、Y、Z)で制御されており、3次元の製品配置を可能にします。トラック軌道と動的フレームワークコンディションは、パレットパターンや外部影響要素に合わせて事前定義またはPLCによる計算が可能です。ポータル軸はRobot-Control(RoCo)によって制御されます。RoCoモーションプレーナは、すべてのポータル軸の動きを調整します。注入や除去軸などその他の軸は統合されたPLCに制御されます。ポータルパレタイザの最適化されたスペース活用のおかげで、パレットはグラバから直接除去されます。

ラベリングおよび装飾
コンテナはコンベヤベルト経由、または集積コンベヤベルトから注入されます。サーボモータ駆動によるインフィードスターがコンテナを引き継ぎ、コンテナテーブルに注入します。これは注入ネジやラベリングマシンの回転ディスクと同期して動作します。ラベリングマシンはほとんどの場合一定の速度で動作します。例えば、コンテナテーブルはプロセスに合わせたスピードで回転します。